
About
I’m a Ph.D. researcher at Nanyang Technological University working on trustworthy AI for robotic and autonomous systems. I care about making learning-based systems reliable in the real world: exposing failure modes, detecting them at runtime, and designing policies that handle uncertainty safely.
- robust perception & decision-making
- uncertainty estimation and monitoring
- safety evaluation, testing, and simulation
- ML systems that must work under real-world constraints
I am actively seeking AI or robotics roles, with a focus on autonomous systems and trustworthy AI. I am open to both industry and research opportunities—please feel free to contact me if my experience is a good fit.
Research focus
My work sits at the intersection of:
- Adversarial / stress testing: generate rare, hard cases to reveal weaknesses
- Online monitoring: detect distribution shift, uncertainty, and anomalies at runtime
- Decision-making under uncertainty: safer planning/control when information is imperfect
Design philosophy: failure-aware AI
I treat “trustworthy” as a lifecycle: find failures → measure them → reduce them → monitor them in deployment. This mindset applies to many robotics settings (mobile robots, manipulation, drones, and other safety-critical autonomy), not just one domain.
Experience (engineering mindset)
Before my Ph.D., I worked as a software engineer at ZTE, developing high-frequency algorithms (up to 240kHz) for 5G systems. That experience pushed me toward building systems that are deployable, efficient, and testable—not just good in a paper.
An Approach to Trustworthy AI
My research is centered on adversarial design. Trustworthy AI is not achieved by average-case performance, but by continuously exposing and managing failure modes. Illustrated here using autonomous driving as a safety-critical testbed, but applicable to broader AI and robotic systems.
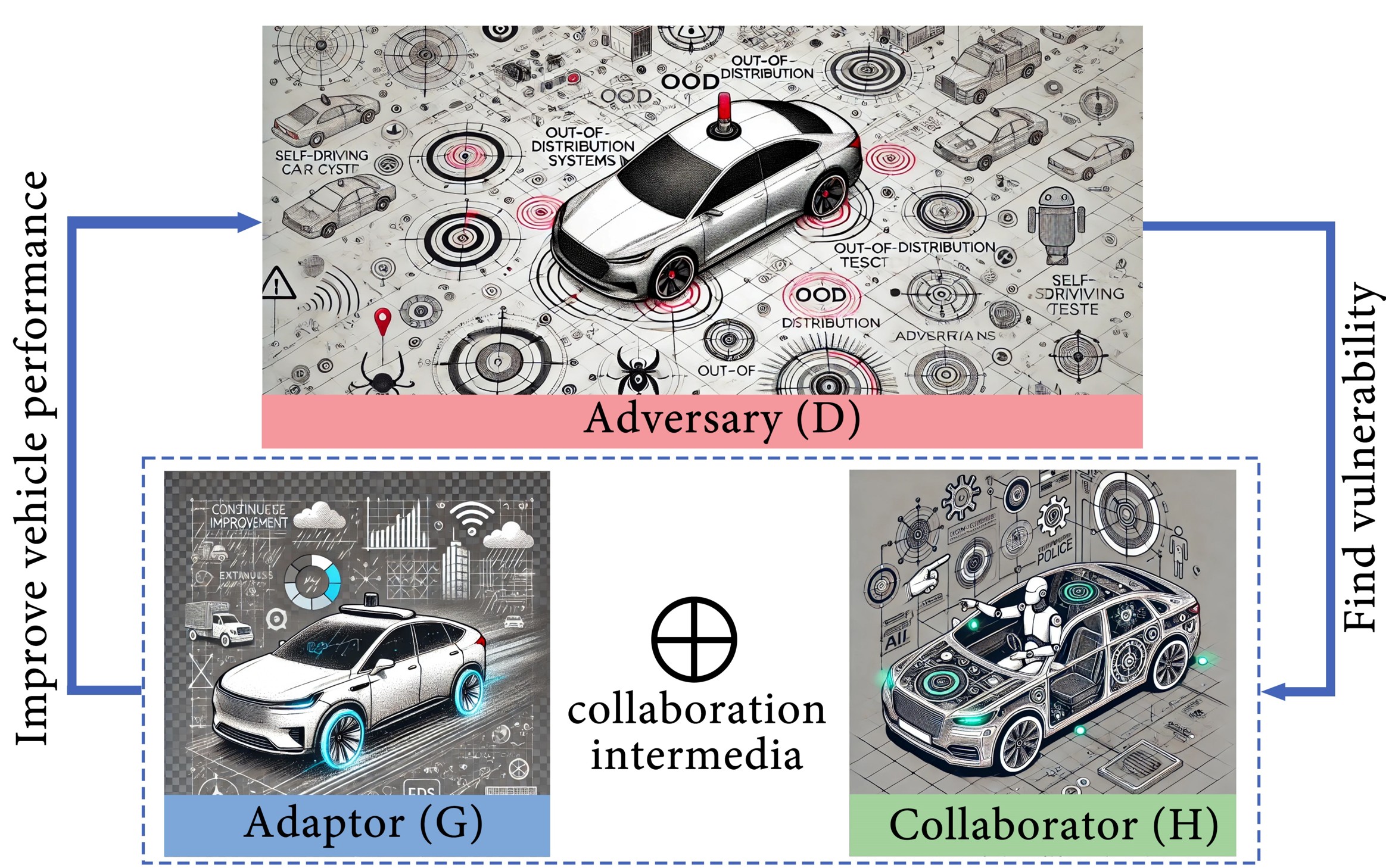
-Adversary actively generates rare, risky, and adversarial scenarios to expose system weaknesses, using passive and active testing as well as objective and subjective evaluations.
-Adaptor continuously improves perception, decision-making, and control to mitigate the failures revealed by adversarial exposure.
-Collaborator (Human-in-the-loop) provides human assistance when uncertainty, ambiguity, or risk exceeds the autonomous system’s capability.